
A technique to consider a digicam is a tool that initiatives a 3D world in a 2D area. People are able to these 2D photos and intuitively inferring the 3D world. For instance, the relative distances, dimension actions, and spatial relationships of objects within the photos. Nonetheless, computer systems should not have this inherent skill.
What’s Digital camera Calibration?
Digital camera calibration is the method of figuring out the geometric traits of 2D photos captured in 3D area. This enables picture processing methods to make inferences in regards to the scenes in these photos for functions the place metric info is required. For instance, in numerous types of picture evaluation, comparable to 3D reconstruction, object monitoring, augmented actuality, and many others.
To do that, a digicam calibration system wants to know the digicam’s properties and have the intelligence to course of and perceive the context of a scene and the objects inside it. That is very true for distorted photos.
Step one is to estimate the parameters of the digicam (lens and picture sensor). To not point out “world” parameters such because the axis, focal size, and orientation by way of rotation and translation vector. From there, the system can successfully map the relationships of a scene from 2D picture coordinates to factors in 3D area.
This has completely different makes use of:
- Correcting lens distortion
- Measuring the scale and distances of objects
- Figuring out the situation and orientation of the digicam inside a scene
- Constructing 3D fashions of objects captured in 2D digicam movement
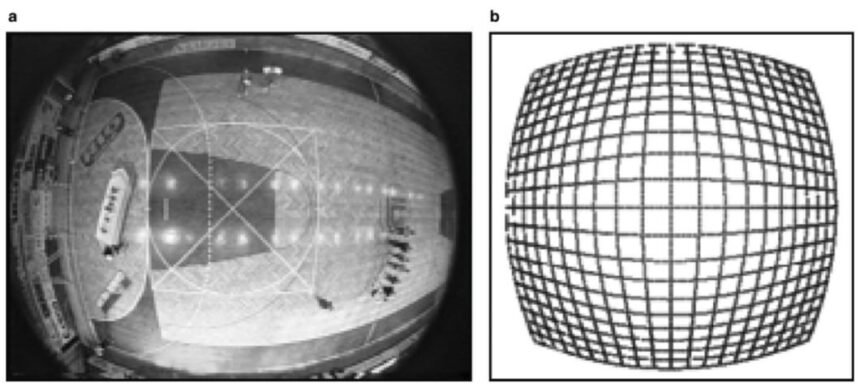
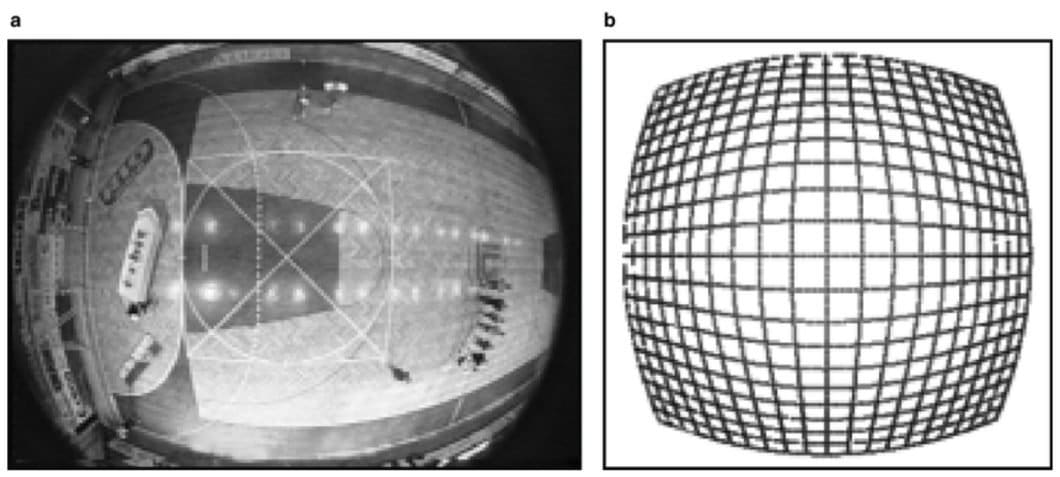
Lens distortion will be radial or tangential. Radial distortion makes straight strains seem curved; assume fisheye cameras. Alternatively, tangential distortion happens when the lens isn’t aligned parallel to the imaging airplane. Radial distortion makes the picture seem curved inward or outward, whereas tangential distortion principally impacts perspective.
Digital camera calibration has vital functions in all kinds of fields, together with robotics, navigation, 3D scene reconstruction, and monitoring.
About us: Viso Suite is the end-to-end laptop imaginative and prescient platform. With Viso Suite, it turns into potential for enterprises to begin utilizing machine studying with out a single line of code. E-book a demo with us to be taught extra.
How Does Digital camera Calibration Work?
Two phrases typically used interchangeably on this context are geometric digicam calibration and digicam resectioning. Researchers use these methods to estimate the parameters of a lens or picture sensor.
Particularly, geometric digicam calibration is the method of figuring out the very important traits of a digicam. In flip, these traits will be divided into each intrinsic and extrinsic properties.
Intrinsic/inside properties are properties which might be constructed into the design and specs of the digicam:
- Focal size
- Principal level
- Lens distortion
Alternatively, extrinsic/exterior properties contain how the digicam pertains to the scene in bodily area:
Digital camera resectioning overlaps with geometric digicam calibration to some extent however with a barely completely different nuance. It entails figuring out the optical heart of a digicam and the way that pertains to a selected scene or picture factors in 3D area. It’s a part of geometric digicam calibration that primarily encompasses figuring out the exterior properties of the digicam.
Methods to Do Digital camera Calibration Utilizing a Calibration Sample
Usually, when creating AI fashions, we use present annotated datasets to coach them and check their efficiency. Researchers use an analogous idea referred to as calibration sample relating to digicam calibration. This provides cameras outfitted with laptop imaginative and prescient a sturdy, baseline sample from which to deduce properties of the digicam itself which will trigger any distortion or modifications in perspective.
By making use of what it learns in opposition to the calibration sample, it might use these properties to make predictions in additional advanced scenes.
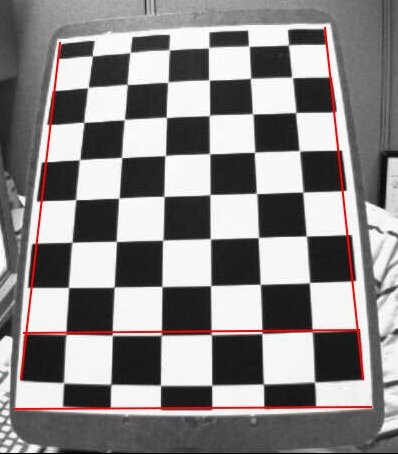
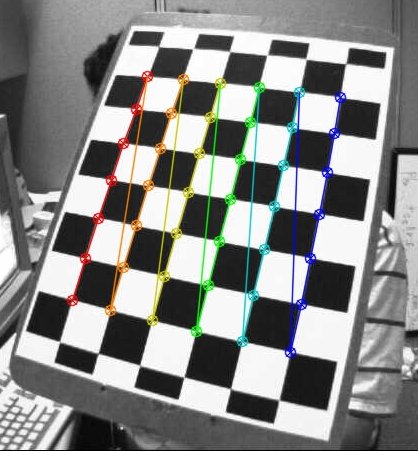
Lens distortion will probably be extra intense on squares on the nook factors of a checkerboard than within the heart. By measuring the variations in distortion throughout the sample, the system could make many inferences in regards to the digicam’s intrinsic properties.
The identical applies to the exterior properties. The squares in a head-on picture of the checkerboard will seem completely different from these taken at an angle. They may also seem like completely different sizes, relying on the space of the digicam to the sample.
It’s additionally vital to measure these key parameters:
- The scale (size and width) of the calibration sample or calibration object
- The space between the digicam and the calibration sample
- The orientation of the digicam to the calibration sample
- The scale (in pixels) of the picture of the calibration sample/object captured by the digicam
For correct calibration, it’s finest to begin with the digicam aligned to the middle of the calibration sample with a perpendicular angle.
With this, a number of photos of a calibration sample with the digicam in numerous poses will be taken. By collating the info, the digicam parameters will be solved. As soon as the digicam parameters are recognized, the findings will be utilized to interpret extra advanced scenes.
To guage the accuracy of the estimated parameters, you may:
- Plot the relative areas of the digicam to the calibration sample when taking check photos
- Calculate the severity of re-projection errors (how far off the digicam’s estimated projections of 3D factors are)
- Calculate the severity of the parameter estimation errors (errors in estimating the digicam’s intrinsic and extrinsic properties)
Digital camera Calibration Matrix
On the coronary heart of fixing the digicam calibration technique lies the digicam calibration matrix. It mathematically represents the projection relationship of 2D and 3D object factors within the picture with the properties of the digicam. The next matrix sometimes represents it:
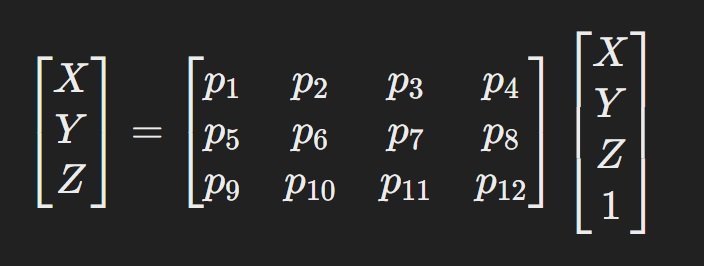
On this matrix:
- The X, Y, Z to the left represents the 2D pixel coordinates of a degree projected in picture area
- The X, Y, Z, 1 symbolize the homogeneous coordinates of a degree within the 3D world coordinate system
- The 4×3 grid is known as the “digicam matrix” or “projection matrix.” It represents the intrinsic and extrinsic properties of the digicam.
To start with, a few of the metrics within the 4×3 projection matrix will probably be unknown. Different metrics, like the space and angle of the digicam, are underneath the management of the experimenter. From this level, the method mainly entails taking photos from completely different distances and angles, utilizing the recognized variables to resolve for the unknown variables mathematically.
Fixing these equations entails varied methods, comparable to utilizing linear equations or non-linear optimization strategies just like the Levenberg-Marquardt Algorithm.
Digital camera Calibration Fashions
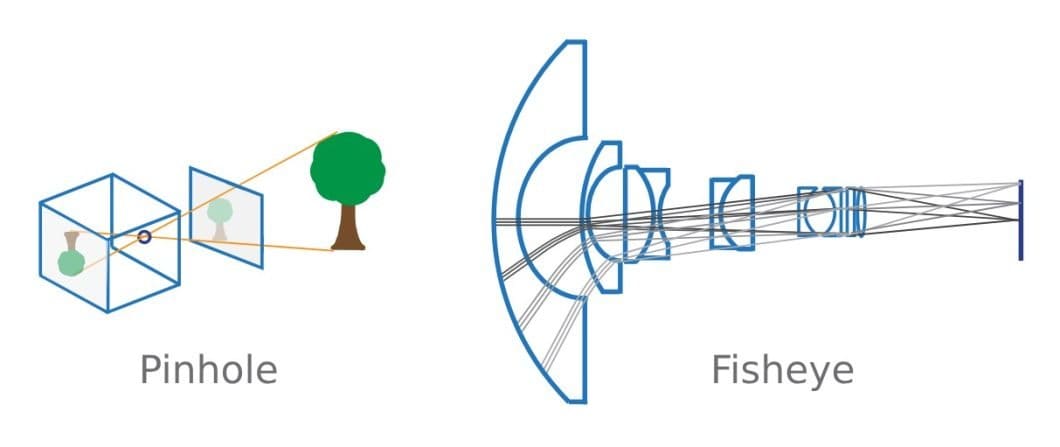
Utilizing varied fashions as edge instances is beneficial for improved generalization and general efficiency in digicam calibration. It’s possible you’ll already be aware of the ideas of a pinhole and fisheye digicam. They’re thought-about nearly full opposites, with a pinhole digicam having no lens and thus no diploma of distortion. Alternatively, a fisheye digicam has a thick or extremely curved lens that ends in intense distortion.
For instance, the MATLAB Laptop Imaginative and prescient Toolbox™ offers calibration algorithms for each fashions, with the one for fish eye cameras supporting a Discipline of View (FOV) of as much as 195 levels.
Nonetheless, since they’ve nearly no distortion, pinhole cameras are sometimes used to idealize the system. Laptop imaginative and prescient fashions then use an algorithm to simulate radial and tangential lens distortion to higher mannequin a real digicam. An instance of that is contained within the Digital camera Calibration Toolbox for MATLAB by J.Y. Bouguet.
Whilst you can mannequin a fisheye digicam beginning with a pinhole digicam, the alternative will not be true. As a extremely simplified mannequin, the one intrinsic properties of word in a pinhole digicam mannequin are the focal size and optical heart. This makes for a a lot simpler calibration course of as follows.
- The digicam matrix maps the 3D scene to the picture airplane
- The calibration algorithm makes use of the intrinsic and extrinsic properties to calculate the digicam matrix
- The world factors are transformed to digicam coordinates utilizing the extrinsic parameters
- The digicam coordinates are mapped to the picture airplane utilizing the intrinsic parameters
- The algorithm then makes use of established radial and tangential distortion coefficients to appropriate for it
Digital camera Calibration With OpenCV
It’s possible you’ll already be aware of OpenCV, a complete library for laptop imaginative and prescient functions. One such software is digicam calibration, powered by present options comparable to MATLAB and ROS (Robotic Working System). Like different laptop imaginative and prescient functions, researchers and builders favor OpenCV because of its accessible programming base (C/C++), versatility, and neighborhood help.
Utilizing OpenCV, researchers can clear up for each radial and tangential distortion in digicam calibration eventualities. In its official documentation, OpenCV offers an entire implementation information for digicam calibration (OpenCV digicam calibration). You’ll see that they use well-defined mathematical equations to symbolize each sorts of distortions. These fashions intention to calculate the distortion in each the x and y dimensions.
The tip aim is to calculate the 5 distortion coefficients, that are additionally variables within the equations for radial and tangential distortion. For the digicam matrix, one can take the x and y values of the focal size and optical facilities as 4 of the 9 properties of the digicam.
For stereo functions, we first must appropriate the noticed distortions. That is the place pattern photos of the calibration sample step in; taken and recorded from completely different angles and distances. The following step is to additionally establish particular factors that we will precisely measure, such because the sq. corners of the chess board.
This fashion, we’ve got all of the important coordinates from real-world area. Then, evaluating them to the corresponding coordinates in picture area and utilizing the algorithms supplied, we will clear up for the distortion coefficients. For finest outcomes, OpenCV recommends utilizing no less than 10 completely different check patterns.
If you wish to find out about how laptop imaginative and prescient will be utilized throughout completely different industries or sectors, learn the next blogs to get extra info.