

The RetinaNet mannequin is a one-stage object detection mannequin incorporating options comparable to Focal Loss, a Function Pyramid Community (FPN), and varied architectural enhancements. These enhancements present a singular steadiness between pace and accuracy, making RetinaNet a singular mannequin.
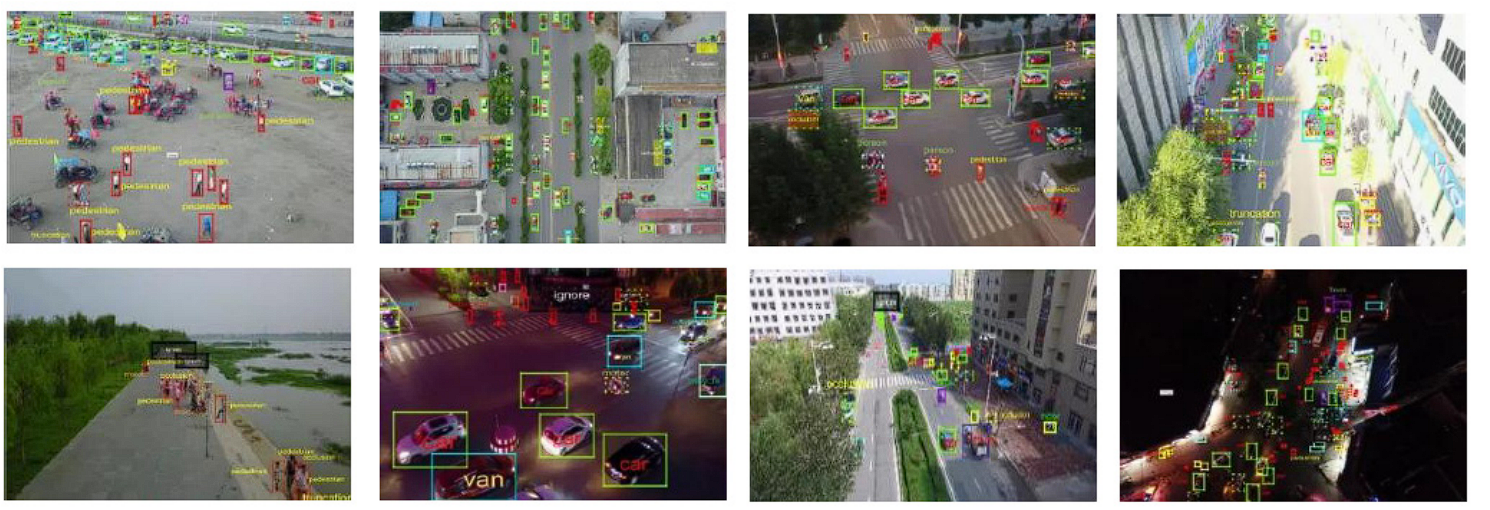
Object detection, a core job in pc imaginative and prescient, entails pinpointing and classifying objects inside photographs or movies. This underpins functions like self-driving automobiles, safety surveillance, and augmented actuality.
About us: Viso Suite is the end-to-end pc imaginative and prescient infrastructure permitting ML groups to eradicate the necessity for level options. Viso Suite covers all levels within the software lifecycle from sourcing information to mannequin coaching to deployment and past. To learn the way Viso Suite helps enterprises simply combine pc imaginative and prescient into their workflows, ebook a demo.
Two important approaches dominate object detection: One-Stage (like YOLO and SSD) and Two-Stage detectors (like R-CNN). Two-stage fashions suggest possible object areas first, then classify and refine their bounding bins. One-stage fashions bypass this step, predicting classes and bounding bins straight from the picture in a single go.
Two-stage fashions (e.g., R-CNN) excel in accuracy and dealing with advanced scenes. Nevertheless, their processing time makes them much less appropriate for real-time duties. Alternatively, one-stage fashions are quick however have limitations:
- Accuracy vs. Velocity: Excessive-accuracy fashions are computationally costly, resulting in slower processing. YOLO prioritizes pace, sacrificing some accuracy, significantly for small objects, in comparison with R-CNN variants.
- Class Imbalance: One-stage fashions deal with detection as a regression downside. When “background” vastly outnumbers precise objects, the mannequin will get biased in direction of the background (unfavourable) class.
- Anchors: YOLO and SSD depend on predefined anchor bins with particular sizes and ratios. This will restrict their means to adapt to numerous object sizes and shapes.
What’s RetinaNet?
RetinaNet is an object detection mannequin that tries to beat the constraints of object detection fashions talked about above, particularly addressing the lowered accuracy in single-stage detectors. Regardless of RetinaNet being a Single-Stage detector it supplies a singular steadiness between pace and accuracy.
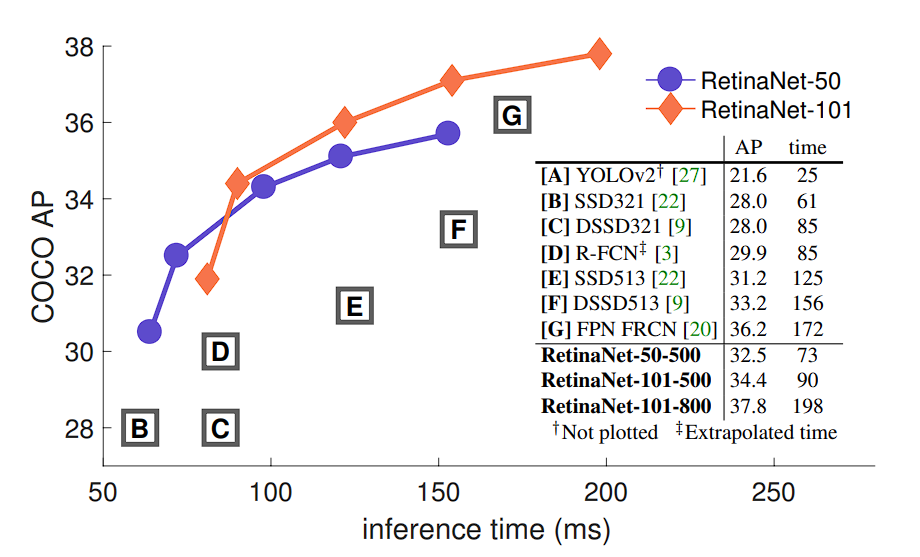
It was launched by Tsung-Yi Lin and the crew of their 2017 paper titled “Focal Loss for Dense Object Detection.” Benchmark outcomes on the MS COCO dataset present that the mannequin achieves an excellent steadiness between precision (mAP) and pace (FPS), making it appropriate for real-time functions.
RetinaNet incorporates the next options:
- Focal Loss for Object Detection: RetinaNet introduces Focal Loss to sort out the category imbalance downside throughout coaching. That is achieved by modifying the usual cross-entropy loss operate to down-weight the loss assigned to well-classified examples. It offers much less significance to simply labeled objects and focuses extra on exhausting, misclassified examples. This permits for elevated accuracy with out sacrificing pace.
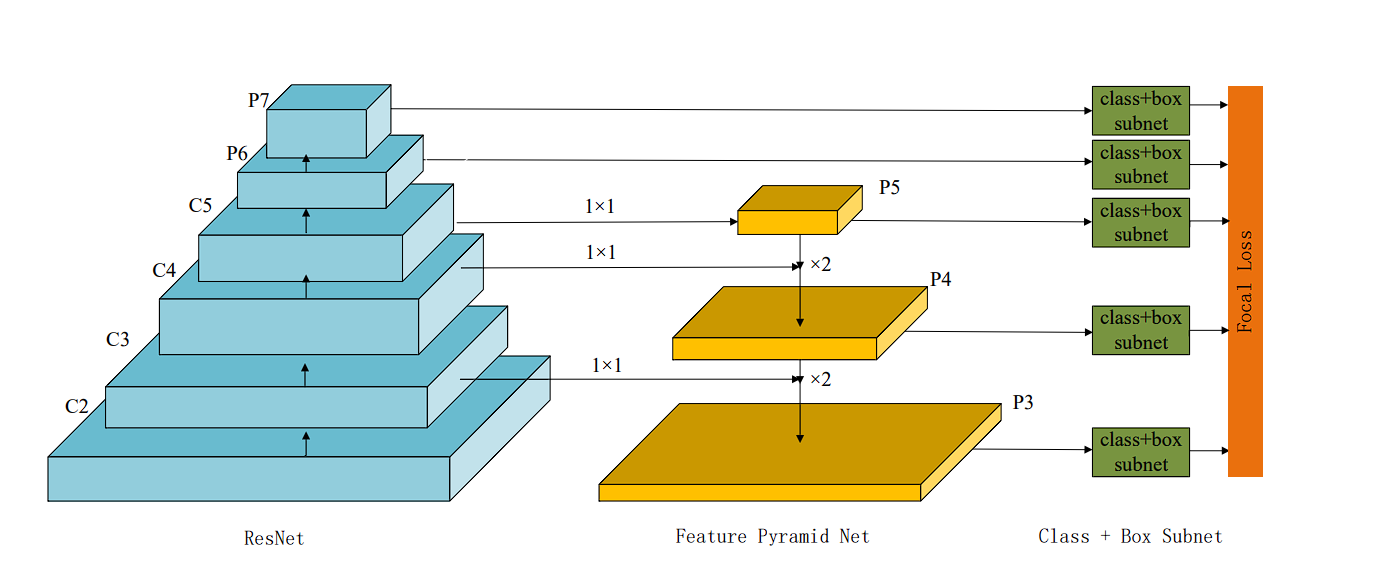
- Function Pyramid Community (FPN): RetinaNet incorporates an FPN as its spine structure. This enhances its means to detect objects at completely different scales successfully.
- ResNet: FPN is constructed on high of a typical convolutional neural community (CNN) like ResNet.
- SubNetworks: These are specialised smaller networks that department off the primary characteristic extraction spine. They’re of two varieties:
- Classification Subnet
- Field Regression Subnet
RetinaNet surpasses a number of object detectors, together with one-stage and two-stage fashions, it varieties an envelope of all of the listed detectors.
Earlier than we dive deeper into the structure of RetinaNet, let’s have a look at among the fashions earlier than it, and the constraints and enhancements they remodeled the earlier fashions.
Overview of Object Detection Fashions
- R-CNN (Areas with CNN options) 2014:
- Limitations: R-CNN was one of many first fashions that used CNNs for object detection however was gradual because of the have to course of a number of areas individually. It additionally required a separate algorithm for proposing areas, which added to the complexity and processing time.
- Quick R-CNN (2015):
- Enhancements: Launched ROI pooling to hurry up processing by sharing computations throughout proposed areas.
Limitations: Though quicker than R-CNN, it nonetheless relied on selective seek for area proposals, which was a bottleneck.
- Enhancements: Launched ROI pooling to hurry up processing by sharing computations throughout proposed areas.
- Quicker R-CNN (2015):
- Enhancements: Built-in a Area Proposal Community (RPN) that shares full-image convolutional options with the detection community, bettering each pace and accuracy.
- Limitations: Whereas it was extra environment friendly, the complexity of the mannequin and the necessity for appreciable computational sources restricted its deployment in resource-constrained environments.
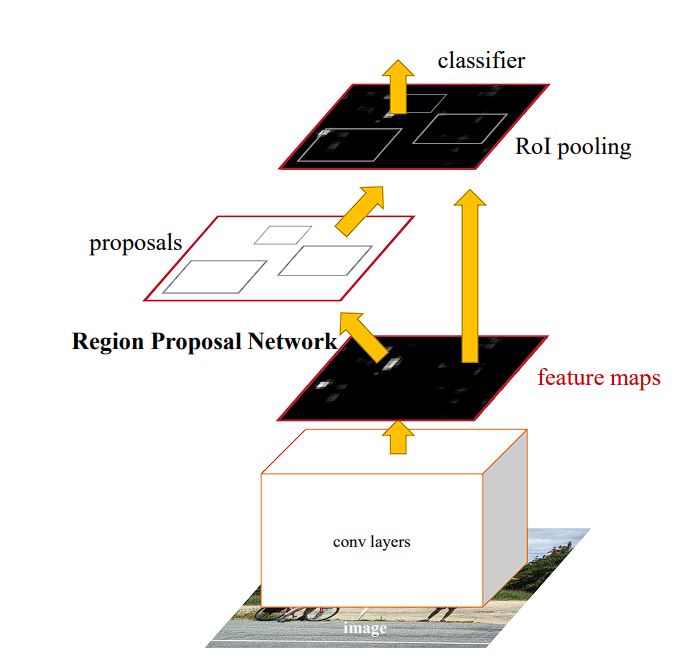
Quicker R-CNN –source
- YOLO (You Solely Look As soon as) (2016):
- SSD (Single Shot MultiBox Detector) (2016):
- Enhancements: Tried to steadiness pace and accuracy higher than YOLO through the use of a number of characteristic maps at completely different resolutions to seize objects at varied scales.
- Limitations: The accuracy was nonetheless not on par with the extra advanced fashions like Quicker R-CNN, particularly for smaller objects.
RetinaNet Structure
What’s ResNet?
ResNet (Residual Community), is a sort of CNN structure that solves the vanishing gradient downside, throughout coaching very deep neural networks.
As networks develop deeper, the community tends to endure from a vanishing gradient. That is when the gradients utilized in coaching change into so small that studying successfully stops attributable to activation features squashing the gradients.
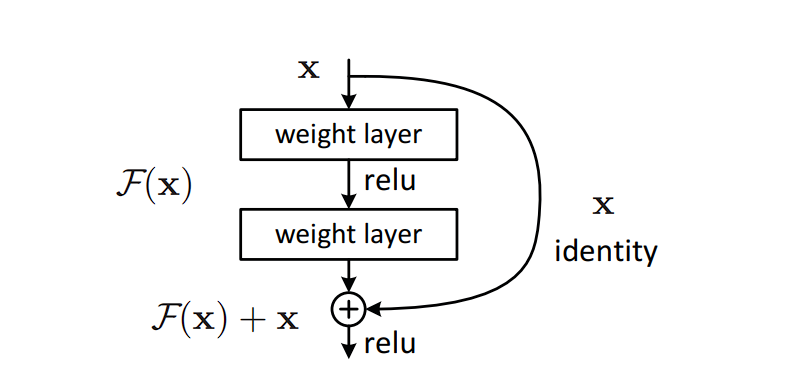
ResNet solves this downside by propagating the gradient all through the community. The output from an earlier layer is added to the output of a later layer, serving to to protect the gradient that may be misplaced in deeper networks. This permits for the coaching of networks with a depth of over 100 layers.
Function Pyramid Community (FPN)
Detecting objects at completely different scales is difficult for object detection and picture segmentation. Listed below are among the key challenges concerned:
- Scale Variance: Objects of curiosity can differ considerably in dimension, from very small to very massive, relative to the picture dimension. Conventional CNNs would possibly excel at recognizing medium-sized objects however typically battle with very massive or very small objects attributable to fastened receptive subject sizes.
- Lack of Element in Deep Layers: As we go deeper right into a CNN, the spatial decision of the characteristic maps decreases attributable to pooling layers and strides in convolutions. This leads to a lack of fine-grained particulars that are essential for detecting small objects.
- Semantic Richness vs. Spatial Decision: Usually, deeper layers in a CNN seize high-level semantic data however at a decrease spatial decision. Conversely, earlier layers protect spatial particulars however comprise much less semantic data. Balancing these points is essential for efficient detection throughout completely different scales.
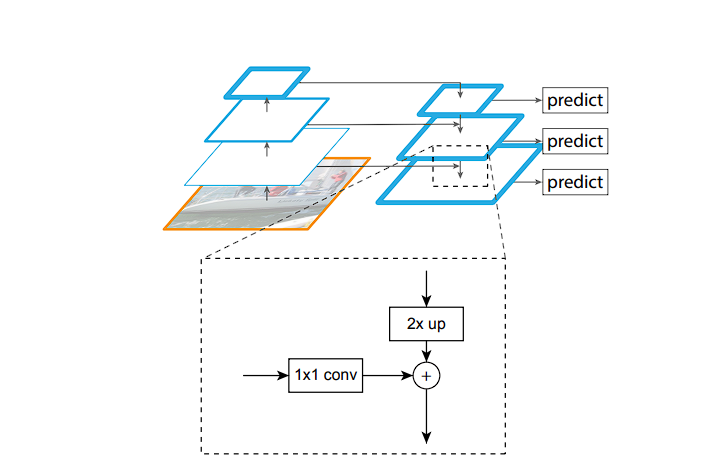
The FPN permits RetinaNet to detect objects at completely different scales successfully. Right here is the way it works.
FPN enhances the usual convolutional networks by making a top-down structure with lateral connections.
Because the enter picture progresses via the community, the spatial decision decreases (attributable to max pooling and convolutions), whereas the characteristic illustration turns into richer and semantically stronger. The preliminary layers have detailed picture options, the final layers have condensed representations.
- Prime-Down Path: After reaching the deepest layer (smallest spatial decision however highest abstraction), the FPN constructs a top-down pathway, steadily growing spatial decision by up-sampling characteristic maps from deeper (increased) layers within the community.
- Lateral Connections: RetinaNet leverages lateral connections to strengthen every upsampled map. These connections add options from the corresponding stage of the spine community. To make sure compatibility, 1×1 convolutions are used to cut back the channel dimensions of the spine’s characteristic maps earlier than they’re included into the upsampled maps
Loss Capabilities: Focal Loss
Object Detectors remedy classification and regression issues concurrently (class labels of the objects and their bounding field coordinates). The general loss operate is a weighted sum of the person losses of every. By minimizing this mixed loss, an object detector learns to precisely determine each the presence and the exact location of objects in photographs.
For the classification a part of object detection cross-entropy loss is used. It measures the efficiency of a classification mannequin whose output is a likelihood worth between 0 and 1.
RetinaNet makes use of a modified model of cross-entropy loss. It’s known as Focal loss. Focal Loss addresses the problem of sophistication imbalance in dense object detection duties.
How does Focal Loss work?
Customary cross-entropy loss suffers in object detection as a result of a lot of simple unfavourable examples dominate the loss operate. This overwhelms the mannequin’s means to be taught from much less frequent objects, resulting in poor efficiency in detecting them.
Focal Loss modifies the usual cross-entropy loss by including a focusing parameter that reduces the relative loss for well-classified examples (placing extra give attention to exhausting, misclassified examples), and a weighting issue to deal with class imbalance. The system for Focal Loss is:

Right here,
- pt is the mannequin’s estimated likelihood for every class being the true class.
- αt is a balancing issue for the category (usually set to 0.25 inside RetinaNet)
- γ is a focusing parameter to regulate the speed at which simple examples are down-weighted. It’s usually set to 2 in RetinaNet.
- (1−pt)γ reduces the loss contribution from simple examples and extends the vary through which an instance receives low loss.
Focal Loss helps enhance the efficiency of object detection fashions, significantly in instances the place there’s a vital imbalance between foreground and background lessons, by focusing coaching on exhausting negatives and giving extra weight to uncommon lessons.
This makes fashions educated with Focal Loss simpler in detecting objects throughout a variety of sizes and sophistication frequencies.
Subnetworks: Classification and Bounding Field Regression
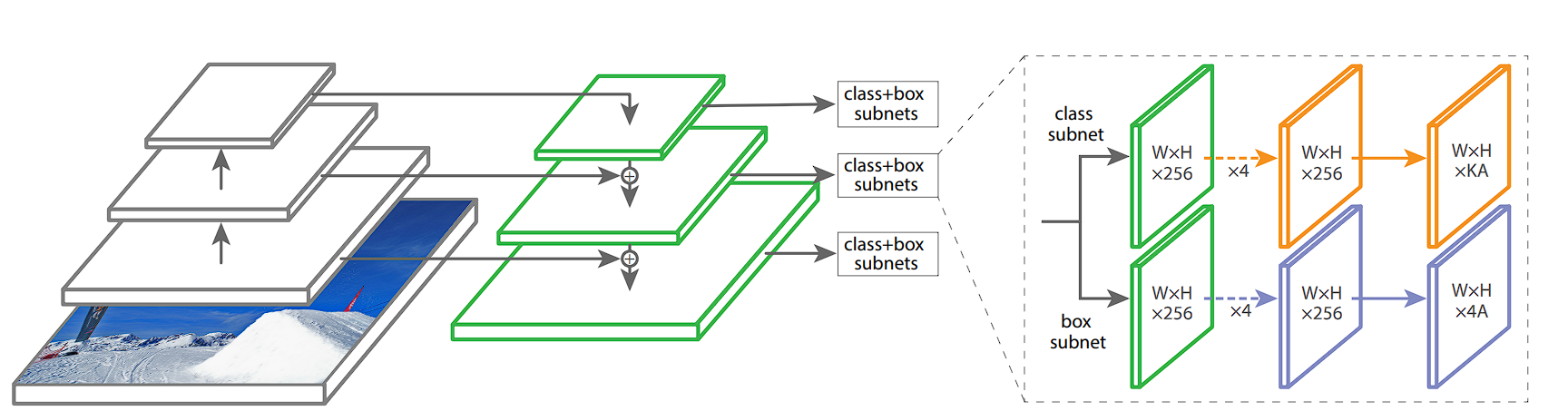
RetinaNet makes use of an FPN and two task-specific subnetworks linked to every stage of the pyramid. The FPN takes a single-scale enter and produces pyramid characteristic maps at completely different scales. Every stage of the pyramid detects objects of various sizes.
Two Subnetworks
The 2 distinct subnetworks are connected to each stage of the characteristic pyramid. Every stage of the characteristic pyramid feeds into each subnetworks, permitting the mannequin to make predictions at a number of scales and facet ratios. The subnetworks encompass classification and bounding field regression networks:
- Classification Subnetwork: The classification subnetwork, a small absolutely convolutional community, attaches to every stage of the characteristic pyramid. It consists of a number of convolutional layers adopted by a sigmoid activation layer. This subnetwork predicts the likelihood of object presence at every spatial location for every anchor and every object class.
- Bounding Field Regression Subnetwork: This subnetwork predicts the offset changes for the anchors to raised match the precise object-bounding bins. It consists of a number of convolutional layers however ends with a linear output layer. This subnetwork predicts 4 values for every anchor, representing the changes wanted to rework the anchor right into a bounding field that higher encloses a detected object.
Purposes of RetinaNet
The Way forward for RetinaNet
In conclusion, RetinaNet has established itself as an awesome single-stage object detection mannequin, providing excessive accuracy and effectivity. Its key innovation, the Focal Loss mixed with FPN, and Two Subnetworks addresses the problems of sophistication imbalances. These developments have led to RetinaNet reaching state-of-the-art accuracy on varied benchmarks.
Nevertheless, there are a number of areas through which it may possibly make developments sooner or later:
- Quicker Inference Speeds: Whereas RetinaNet already presents a steadiness between accuracy and pace, loads of real-time functions comparable to autonomous driving and robotics require quicker inference time. Analysis can discover environment friendly community architectures particularly designed for resource-constrained environments like cellular gadgets.
- Multi-task Studying: RetinaNet may be prolonged for duties past object detection. By incorporating extra branches within the community, it might be used for duties like object segmentation, and pose estimation, all using the efficiency of the mannequin.
- Improved Spine Architectures: RetinaNet depends on ResNet as its spine structure. Nevertheless, newer and extra environment friendly spine architectures may be explored by researchers that might obtain higher efficiency.