

Object detection is a vital job in laptop imaginative and prescient that identifies and locates the place an object is in a picture, by drawing bounding containers across the detected objects. The significance of object detection can’t be stated sufficient. It permits for functions in quite a lot of fields, for e.g., it powers autonomous driving, drones, illness detection, and automatic safety surveillance.
On this weblog, we are going to look deeply into FCOS, an revolutionary and standard object detection mannequin utilized to varied fields. However earlier than diving into the improvements introduced by FCOS, you will need to perceive the varieties of object detection fashions obtainable.
Sorts of Object Detection Fashions
Object detection fashions could be divided into two classes, one-stage and two-stage detectors.
Two-Stage Detectors
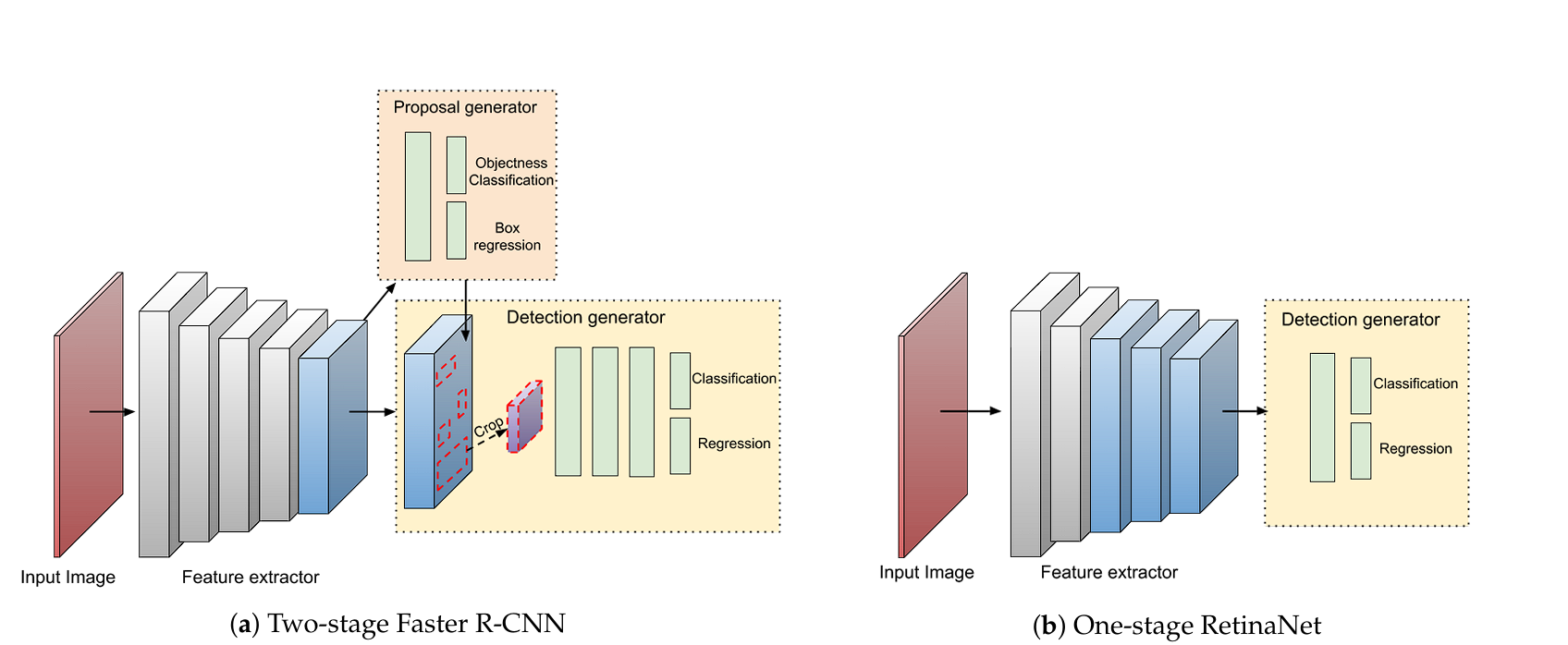
Two-stage detectors, corresponding to R-CNN, Quick R-CNN, and Quicker R-CNN, divide the duty of object detection right into a two-step course of:
- Area Proposal: Within the first stage, the mannequin generates a set of area proposals which might be more likely to comprise objects. That is carried out utilizing strategies like selective search (R-CNN) or a Area Proposal Community (RPN) (Quicker R-CNN).
- Classification and Refinement: Within the second stage, the proposals are labeled into object classes and refined to enhance the accuracy of the bounding containers.
The multi-stage pipeline is slower, extra complicated, and could be difficult to implement and optimize compared to single-stage detectors. Nonetheless, these two-stage detectors are often extra sturdy and obtain increased accuracy.
One-Stage Detectors
One-stage detectors, corresponding to FCOS, YOLO (You Solely Look As soon as), and SSD (Single Shot Multi-Field Detector) eradicate the necessity for regional proposals. The mannequin in a single move immediately predicts class possibilities and bounding field coordinates from the enter picture.
This leads to one-stage detectors being less complicated and simpler to implement in comparison with two-stage strategies, additionally the one-stage detectors are considerably quicker, permitting for real-time functions.
Regardless of their velocity, they’re often much less correct and make the most of pre-made anchors for detection. Nonetheless, FCOS has decreased the accuracy hole in contrast with two-stage detectors and fully avoids the usage of anchors.
What’s FCOS?
FCOS (Absolutely Convolutional One-Stage Object Detection) is an object detection mannequin that drops the usage of predefined anchor field strategies. As an alternative, it immediately predicts the areas and sizes of objects in a picture utilizing a totally convolutional community.
This anchor-free strategy on this state-of-the-art object detection mannequin has resulted within the discount of computational complexity and elevated efficiency hole. Furthermore, FCOS outperforms its anchor-based counterparts.
What are anchors?
In single-stage object detection fashions, anchors are pre-defined bounding containers used in the course of the coaching and detection (inference) course of to foretell the areas and sizes of objects in a picture.
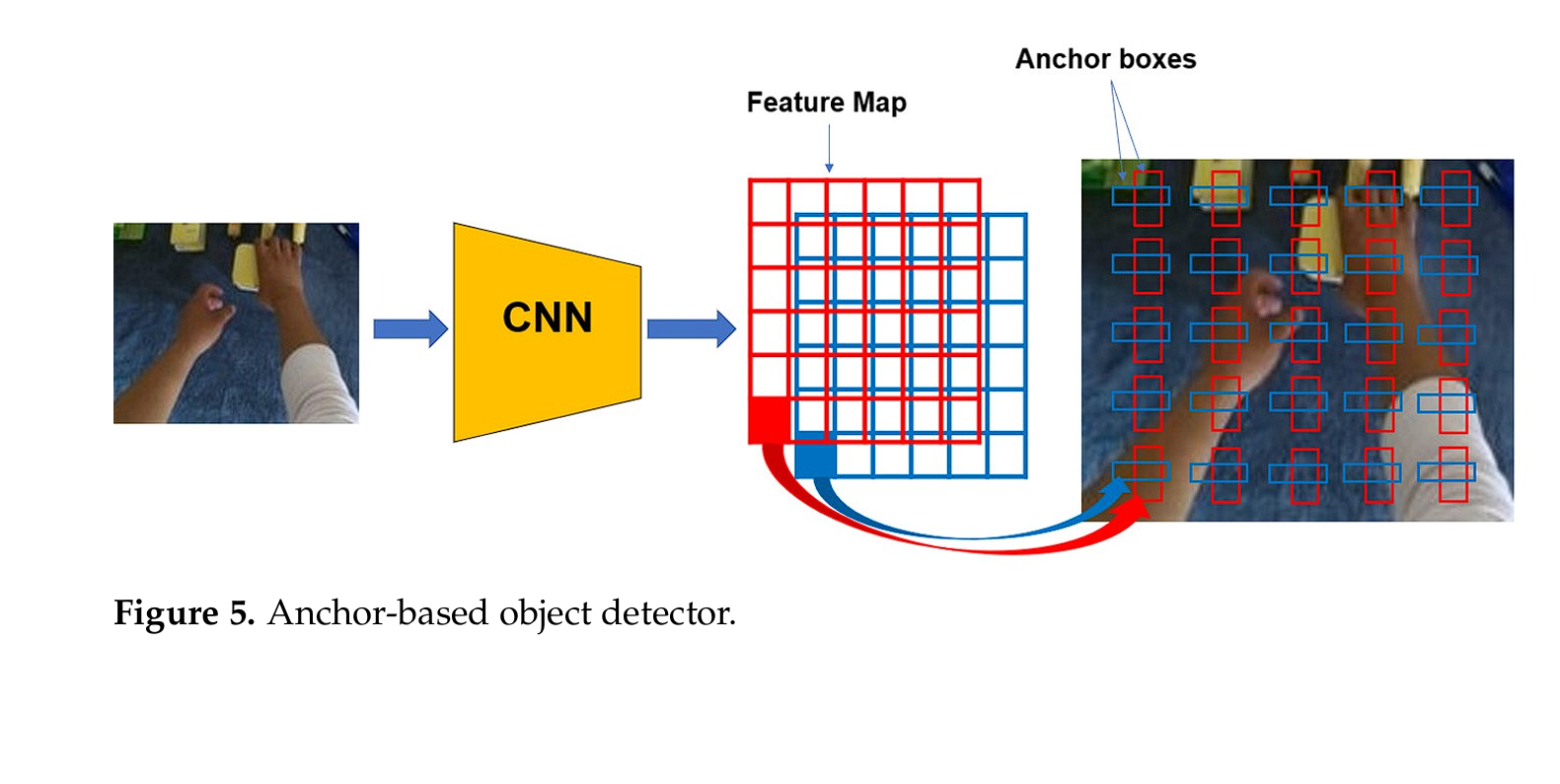
Well-liked fashions corresponding to YOLO and SSD use anchor containers for direct prediction, which ends up in limitations in dealing with various object configurations and dimensions, and likewise reduces the mannequin’s robustness and effectivity.
Limitations of Anchors
- Complexity: Anchor-based detectors rely on quite a few anchor containers of various sizes and side ratios at numerous areas within the picture. This will increase the complexity of the detection pipeline, because it requires the designing of anchors for numerous objects.
- Computation associated to Anchors: Anchor-based detectors make the most of a lot of anchor containers at completely different areas, scales, and side ratios throughout each coaching and inference. That is computationally intensive and time-consuming
- Challenges in Anchor Design: Designing acceptable anchor containers is tough and results in the mannequin being succesful for the particular dataset solely. Poorly designed anchors can lead to decreased efficiency.
- Imbalance Points: The big variety of damaging pattern anchors (anchors that don’t overlap considerably with any floor reality object) in comparison with constructive anchors can result in an imbalance throughout coaching. This could make the coaching course of much less secure and tougher to converge.
How Anchor-Free Detection Works
An anchor-free object detection mannequin corresponding to FCOS takes benefit of all factors in a floor reality bounding field to foretell the bounding containers. In essence, it really works by treating object detection as a per-pixel prediction job. For every pixel on the function map, FCOS predicts:
- Object Presence: A confidence rating indicating whether or not an object is current at that location.
- Offsets: The distances from the purpose to the article’s bounding field edges (high, backside, left, proper).
- Class Scores: The category possibilities for the article current at that location.
By immediately predicting these values, FCOS fully avoids the sophisticated strategy of designing anchor containers, simplifying the detection course of and enhancing computational effectivity.
FCOS Structure
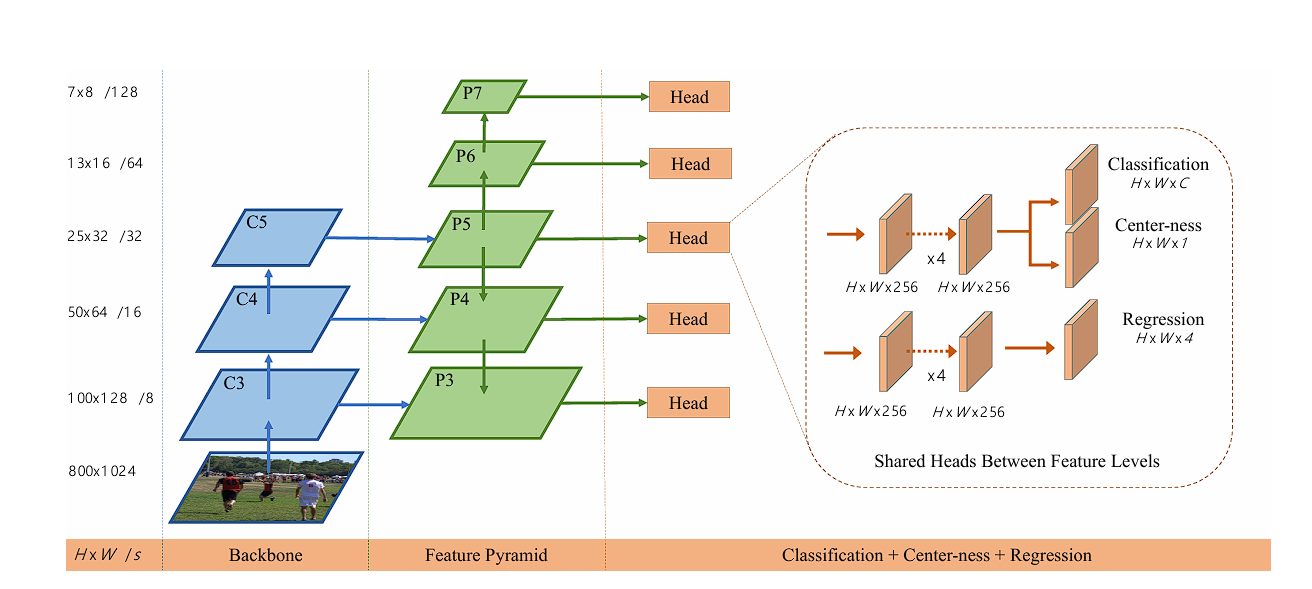
Spine Community
The spine community works because the function extractor, by reworking photographs into wealthy function maps that can be used within the later layers for detection functions within the structure of FCOS. Within the authentic printed analysis paper on FCOS, the researchers used ResNet and ResNeXt because the spine for the mannequin.
The spine community processes the enter picture by way of a number of layers of convolutions, pooling, and non-linear activations. Every layer captures more and more summary and sophisticated options, starting from easy edges and textures within the early layers to whole object components and semantic ideas within the deeper layers.
The function maps produced by the spine are then fed into subsequent layers that predict object areas, sizes, and courses. The spine community’s output ensures that the options used for prediction are each spatially exact and semantically wealthy, enhancing the accuracy and robustness of the detector.
ResNet (Residual Networks)
ResNet makes use of residual connections or shortcuts that skip a number of layers, which assist to sort out the vanishing gradient drawback, permitting researchers to construct deeper fashions, corresponding to ResNet-50, ResNet-101, and ResNet-152 (it has an enormous 152 layers).
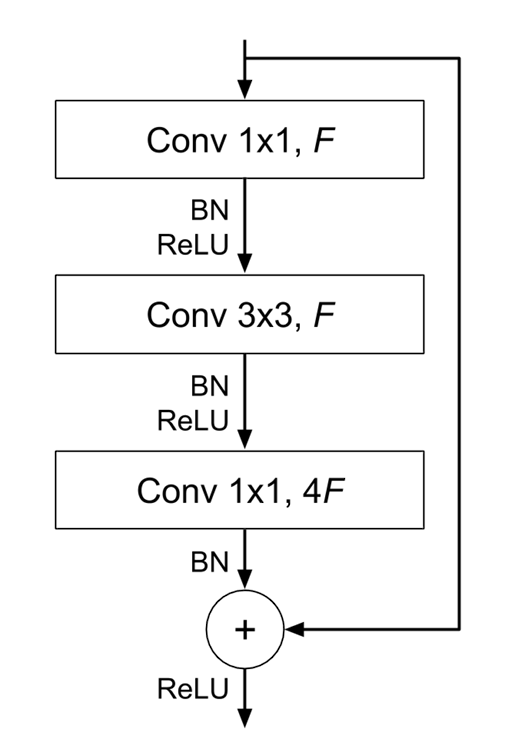
A residual connection connects the output of 1 earlier convolutional layer to the enter of one other future convolutional layer, a number of layers later into the mannequin (consequently a number of CNN layers are skipped). This permits for the gradients to move immediately by way of the community throughout backpropagation, serving to with the vanishing gradient drawback (a serious situation with coaching very deep neural networks).
Within the analysis paper on FCOS, the researchers additionally used a Characteristic Pyramid Community (FPN).
What’s FPN?
A Characteristic Pyramid Community (FPN) is designed to reinforce the power of convolutional neural networks to detect objects at a number of scales. As mentioned above, the preliminary layers detect edges and shapes, whereas deeper layers seize components of a picture and different complicated options. FPN creates an outlet at each the preliminary layers and deeper layers. This leads to a mannequin able to detecting objects of assorted sizes and scales.
By combining options from completely different ranges, the community higher understands the context, permitting for higher separation of objects and background litter.
Furthermore, small objects are tough to detect as a result of they don’t seem to be represented in lower-resolution function maps produced in deeper layers (function map decision decreases as a consequence of max pooling and convolutions). The high-resolution function maps from early layers in FPN enable the detector to determine and localize small objects.
Multi-Degree Prediction Heads
Within the FCOS, the prediction head is accountable for making the ultimate object detection predictions. In FCOS, there are three completely different heads are accountable for completely different duties.
These heads function on the function maps produced by the spine community. The three heads are:
Classification Head
The classification head predicts the article class possibilities at every location within the function map. The output is a grid the place every cell accommodates scores for all potential object courses, indicating the chance that an object of a selected class is current at that location.
Regression Head

The regression head precuts the bounding field coordinated with the article detected at every location on the function map.
This head outputs 4 values for the bounding field coordinates (left, proper, high, backside). By using this regression head, FCOS can detect objects with out the necessity for anchor containers.
For every level on the function map, FCOS predicts 4 distances:
- l: Distance from the purpose to the left boundary of the article.
- t: Distance from the purpose to the highest boundary of the article.
- r: Distance from the purpose to the best boundary of the article.
- b: Distance from the purpose to the underside boundary of the article.
The coordinates of the anticipated bounding field could be derived as:
bbox𝑥1=𝑝𝑥−𝑙
bbox𝑦1=𝑝𝑦−𝑡
bbox𝑥2=𝑝𝑥+𝑟
bbox𝑦2=𝑝𝑦+𝑏
The place (𝑝𝑥,𝑝𝑦) are the coordinates of the purpose on the function map.
Heart-ness Head
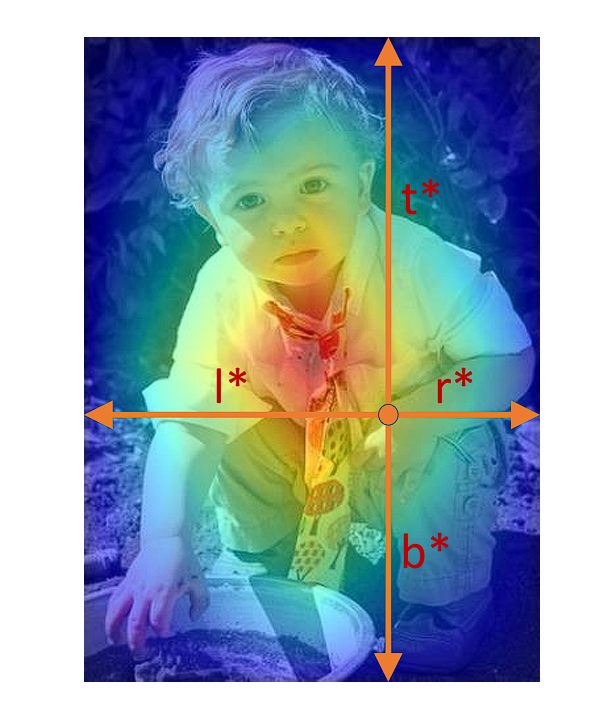
This head predicts a rating of 0 and 1, indicating the chance that the present location is on the heart of the detected object. This rating is then used to down-weight the bounding field prediction for areas removed from an object’s heart, as they’re unreliable and sure false predictions.
It’s calculated as:
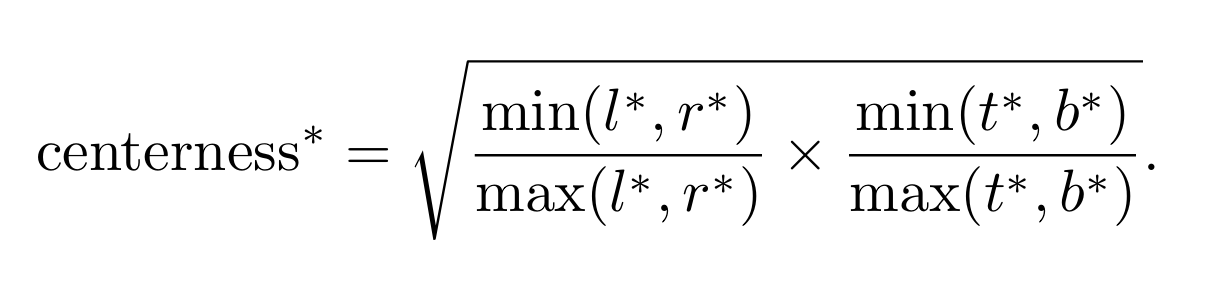
Right here l, r, t, and b are the distances from the placement to the left, proper, high, and backside boundaries of the bounding field, respectively. This rating ranges between 0 and 1, with increased values indicating factors nearer to the middle of the article. It’s calculated utilizing binary cross entropy loss (BCE).
These three prediction heads work collaboratively to carry out object detection:
- Classification Head: This predicts the likelihood of every class label at every location.
- Regression Head: This head offers the exact bounding field coordinates for objects at every location, indicating precisely the place the article is situated throughout the picture.
- Heart-ness Head: This head enhances and corrects the prediction made by the regression head, utilizing the center-ness rating, which helps in suppressing low-quality bounding field predictions (as bounding containers removed from the middle of the article are more likely to be false).
Throughout coaching, the outputs from these heads are mixed. The bounding containers predicted by the regression head are adjusted primarily based on the center-ness scores. That is achieved by multiplying the center-ness scores with prediction scores, which matches into the loss operate, this eradicates the low-quality and off-the-target bounding containers.
The Loss Perform
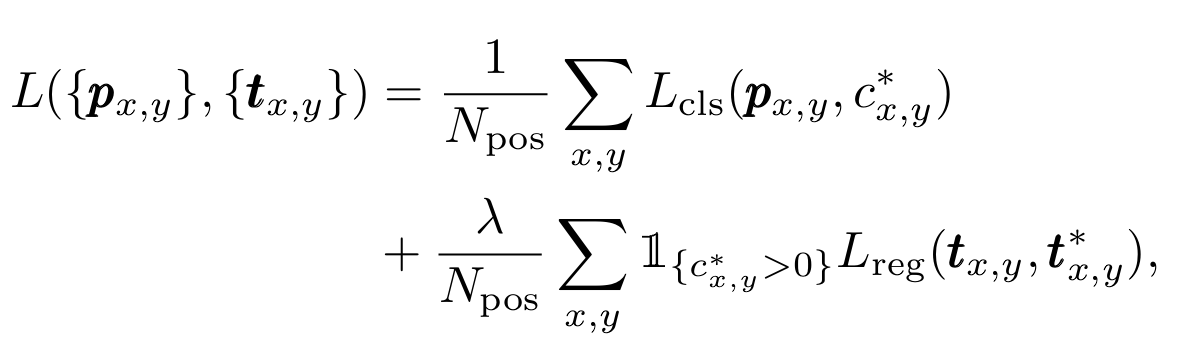
The overall loss is the sum of the classification loss and regression loss phrases, with the classification loss Lcls being focal loss.
Conclusion
On this weblog, we explored FCOS (Absolutely Convolutional One-Stage Object Detection) which is a totally convolutional one-stage object detector that immediately predicts object bounding containers with out the necessity for predefined anchors, one-stage object detectors corresponding to YOLO and SSD, that closely depends on anchors. Because of the anchor-less design, the mannequin fully avoids the sophisticated computation associated to anchor containers such because the IOU loss computation and matching between the anchor containers and ground-truth containers throughout coaching.
The FCOS mannequin structure makes use of the ResNet spine mixed with prediction heads for classification, regression, and center-ness rating (to regulate the bounding field coordinates predicted by the regression head). The spine extracts hierarchical options from the enter picture, whereas the prediction heads generate dense object predictions on function maps.
Furthermore, the FCOS mannequin lays an especially vital basis for future analysis works on enhancing object detection fashions.
Learn our different blogs to reinforce your information of laptop imaginative and prescient duties: